Operações com Matrizes e Vetores em MQL5

Tipos de dados especiais — matrizes e vetores — foram adicionados à linguagem MQL5 para resolver uma grande classe de problemas matemáticos. Os novos tipos oferecem métodos integrados para a criação de código conciso e compreensível que se aproxima da notação matemática. Neste artigo, nós fornecemos uma breve descrição dos Métodos matriciais e vetoriais integrados na seção de ajuda.
Conteúdo
- Tipos de matriz e vetor
- Criação e inicialização
- Cópia das matrizes e vetores
- Cópia de séries temporais para as matrizes ou vetores
- Operações matriciais e vetoriais
- Manipulações
- Produtos
- Transformações
- Estatisticas
- Recursos
- Resolução de equações
- Métodos de Aprendizado de Máquina
- Melhorias no OpenCL
- O futuro da MQL5 no Aprendizado de Máquina
Cada linguagem de programação oferece os tipos de array de dados que armazenam os conjuntos de variáveis numéricas, incluindo int, double e outros. Os elementos do array são acessados pelo índice, o que permite realizar as operações vetoriais usando loops. Os vetores mais comumente usados são os unidimensionais e bidimensionais:
int a[50]; // One-dimensional array of 50 integers double m[7][50]; // Two-dimensional array of 7 subarrays, each consisting of 50 integers MyTime t[100]; // Array containing elements of MyTime type
Os recursos dos vetores geralmente são suficientes para as tarefas relativamente simples relacionadas ao armazenamento e processamento de dados. Mas quando se trata de problemas matemáticos complexos, trabalhar com vetores torna-se difícil tanto em termos de programação quanto de leitura de código, devido ao grande número de loops aninhados. Mesmo as operações de álgebra linear mais simples requerem uma codificação excessiva e uma boa compreensão da matemática.
Tecnologias de dados modernas, como aprendizado de máquina, redes neurais e gráficos 3D, usam amplamente as soluções de álgebra linear associadas aos conceitos de vetores e matrizes. Para facilitar as operações com tais objetos, a MQL5 fornece os tipos de dados especiais: matrizes e vetores. Os novos tipos eliminam muitas operações de programação de rotina e melhoram a qualidade do código.
Tipos de matriz e vetor
Resumindo, um vetor é um array do tipo double unidimensional e uma matriz é um array do tipo double bidimensional. Os vetores podem ser verticais e horizontais; no entanto, eles não são separados em MQL5.
Uma matriz pode ser representada como um array de vetores horizontais, em que o primeiro índice é o número da linha e o segundo índice é o número da coluna.
A numeração de linhas e colunas começa em 0, semelhante aos arrays.
Além dos tipos 'matrix' e 'vector' que contêm os dados do tipo double, existem mais quatro tipos para operações com outros tipos de dados relevantes:
- matrixf — uma matriz contendo elementos do tipo float
- matrixc — uma matriz contendo elementos do tipo complexo
- vectorf — um vetor contendo elementos do tipo float
- vectorc — um vetor contendo elementos do tipo complexo
No momento da escrita deste artigo, o desenvolvimento nos tipos matrixc e vectorc ainda não foram concluídos e, portanto, ainda não é possível usar esses tipos nos métodos integrados.
As funções de modelo suportam notações como matrix<double>, matrix<float>, vector<double>, vector<float> em vez dos tipos correspondentes.
vectorf v_f1= {0, 1, 2, 3,}; vector<float> v_f2=v_f1; Print("v_f2 = ", v_f2); /* v_f2 = [0,1,2,3] */
Criação e inicialização
Os métodos matrix e vector são divididos em nove categorias de acordo com a sua finalidade. Existem várias maneiras de declarar e inicializar as matrizes e vetores.
O método de criação mais simples é declarar sem a especificação de tamanho, ou seja, sem alocação de memória para os dados. Aqui, nós apenas escrevemos o tipo de dados e o nome da variável:
matrix matrix_a; // double type matrix matrix<double> matrix_a1; // another way to declare a double matrix, suitable for use in templates matrix<float> matrix_a3; // float type matrix vector vector_a; // double type vector vector<double> vector_a1; // another notation to create a double vector vector<float> vector_a3; // float type vector
Então você pode alterar o tamanho dos objetos criados e preenchê-los com os valores desejados. Eles também podem ser usados nos métodos matrix integrados para obter os resultados de cálculo.
Uma matriz ou um vetor pode ser declarado com o tamanho especificado, ao alocar memória para os dados, mas sem inicializar nada. Aqui, após o nome da variável, especificamos o(s) tamanho(s) entre parênteses:
matrix matrix_a(128,128); // the parameters can be either constants matrix<double> matrix_a1(InpRows,InpCols); // or variables matrix<float> matrix_a3(InpRows,1); // analogue of a vertical vector vector vector_a(256); vector<double> vector_a1(InpSize); vector<float> vector_a3(InpSize+16); // expression can be used as a parameter
A terceira maneira de criar objetos é declarar com a inicialização. Nesse caso, os tamanhos da matriz e do vetor são determinados pela sequência de inicialização indicada entre chaves:
matrix matrix_a={{0.1,0.2,0.3},{0.4,0.5,0.6}}; matrix<double> matrix_a1=matrix_a; // the matrices must be of the same type matrix<float> matrix_a3={{1,2},{3,4}}; vector vector_a={-5,-4,-3,-2,-1,0,1,2,3,4,5}; vector<double> vector_a1={1,5,2.4,3.3}; vector<float> vector_a3=vector_a2; // the vectors must be of the same type
Há também os métodos estáticos para criar matrizes e vetores do tamanho especificado, inicializados de uma certa maneira:
matrix matrix_a =matrix::Eye(4,5,1); matrix<double> matrix_a1=matrix::Full(3,4,M_PI); matrixf matrix_a2=matrixf::Identity(5,5); matrixf<float> matrix_a3=matrixf::Ones(5,5); matrix matrix_a4=matrix::Tri(4,5,-1); vector vector_a =vector::Ones(256); vectorf vector_a1=vector<float>::Zeros(16); vector<float> vector_a2=vectorf::Full(128,float_value);
Além disso, existem os métodos não estáticos para inicializar uma matriz ou um vetor com os valores dados — Init e Fill:
matrix m(2, 2); m.Fill(10); Print("matrix m \n", m); /* matrix m [[10,10] [10,10]] */ m.Init(4, 6); Print("matrix m \n", m); /* matrix m [[10,10,10,10,0.0078125,32.00000762939453] [0,0,0,0,0,0] [0,0,0,0,0,0] [0,0,0,0,0,0]] */
Neste exemplo, nós usamos o método Init para alterar os tamanhos de uma matriz já inicializada, pelo que todos os novos elementos foram preenchidos com valores aleatórios.
Uma vantagem importante do método Init é a capacidade de especificar uma função de inicialização nos parâmetros para preencher os elementos da matriz/vetor de acordo com esta regra. Por exemplo:
void OnStart() { //--- matrix init(3, 6, MatrixSetValues); Print("init = \n", init); /* Execution result init = [[1,2,4,8,16,32] [64,128,256,512,1024,2048] [4096,8192,16384,32768,65536,131072]] */ } //+------------------------------------------------------------------+ //| Fills the matrix with powers of a number | //+------------------------------------------------------------------+ void MatrixSetValues(matrix& m, double initial=1) { double value=initial; for(ulong r=0; r<m.Rows(); r++) { for(ulong c=0; c<m.Cols(); c++) { m[r][c]=value; value*=2; } } }
Cópia das matrizes e vetores
Matrizes e vetores podem ser copiados usando o método Copy. Mas uma maneira mais simples e familiar de copiar esses tipos de dados é usar o operador de atribuição "=". Além disso, você pode usar o método Assign para copiar.
//--- copying matrices matrix a= {{2, 2}, {3, 3}, {4, 4}}; matrix b=a+2; matrix c; Print("matrix a \n", a); Print("matrix b \n", b); c.Assign(b); Print("matrix c \n", c); /* matrix a [[2,2] [3,3] [4,4]] matrix b [[4,4] [5,5] [6,6]] matrix c [[4,4] [5,5] [6,6]] */
A diferença entre Assign e Copy é que ele pode ser usado para matrizes e arrays. O exemplo abaixo mostra a cópia do array de tipo inteiro int_arr em uma matriz do tipo double. A matriz resultante se ajusta automaticamente de acordo com o tamanho da matriz copiada.
//--- copying an array to a matrix matrix double_matrix=matrix::Full(2,10,3.14); Print("double_matrix before Assign() \n", double_matrix); int int_arr[5][5]= {{1, 2}, {3, 4}, {5, 6}}; Print("int_arr: "); ArrayPrint(int_arr); double_matrix.Assign(int_arr); Print("double_matrix after Assign(int_arr) \n", double_matrix); /* double_matrix before Assign() [[3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14] [3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14]] int_arr: [,0][,1][,2][,3][,4] [0,] 1 2 0 0 0 [1,] 3 4 0 0 0 [2,] 5 6 0 0 0 [3,] 0 0 0 0 0 [4,] 0 0 0 0 0 double_matrix after Assign(int_arr) [[1,2,0,0,0] [3,4,0,0,0] [5,6,0,0,0] [0,0,0,0,0] [0,0,0,0,0]] */ }
O método Assign permite a transição perfeita de arrays para matrizes, com tamanho automatizado e conversão do tipo.
Cópia de séries temporais para as matrizes ou vetores
A análise do grafico de preços implica nas operações com a matriz de estrutura MqlRates. MQL5 fornece um novo método para trabalhar com tais estruturas de dados de preço.
O método CopyRates copia as séries históricas da estrutura MqlRates diretamente em uma matriz ou vetor. Assim, você pode evitar a necessidade de obter as séries temporais necessárias nas matrizes relevantes usando as funções da seção Acesso a séries temporais e indicadores. Além disso, não há necessidade de transferi-los para uma matriz ou vetor. Com o método CopyRates, você pode receber as cotações em uma matriz ou vetor em apenas uma chamada. Vamos considerar um exemplo de como calcular uma matriz de correlação para uma lista de símbolos: vamos calcular esses valores usando dois métodos diferentes e comparar os resultados.
input int InBars=100; input ENUM_TIMEFRAMES InTF=PERIOD_H1; //+------------------------------------------------------------------+ //| Script program start function | //+------------------------------------------------------------------+ void OnStart() { //--- list of symbols for calculation string symbols[]= {"EURUSD", "GBPUSD", "USDJPY", "USDCAD", "USDCHF"}; int size=ArraySize(symbols); //--- matrix and vector to receive Close prices matrix rates(InBars, size); vector close; for(int i=0; i<size; i++) { //--- get Close prices to a vector if(close.CopyRates(symbols[i], InTF, COPY_RATES_CLOSE, 1, InBars)) { //--- insert the vector to the timeseries matrix rates.Col(close, i); PrintFormat("%d. %s: %d Close prices were added to matrix", i+1, symbols[i], close.Size()); //--- output the first 20 vector values for debugging int digits=(int)SymbolInfoInteger(symbols[i], SYMBOL_DIGITS); Print(VectorToString(close, 20, digits)); } else { Print("vector.CopyRates(%d,COPY_RATES_CLOSE) failed. Error ", symbols[i], GetLastError()); return; } } /* 1. EURUSD: 100 Close prices were added to the matrix 0.99561 0.99550 0.99674 0.99855 0.99695 0.99555 0.99732 1.00305 1.00121 1.069 0.99936 1.027 1.00130 1.00129 1.00123 1.00201 1.00222 1.00111 1.079 1.030 ... 2. GBPUSD: 100 Close prices were added to the matrix 1.13733 1.13708 1.13777 1.14045 1.13985 1.13783 1.13945 1.14315 1.14172 1.13974 1.13868 1.14116 1.14239 1.14230 1.14160 1.14281 1.14338 1.14242 1.14147 1.14069 ... 3. USDJPY: 100 Close prices were added to the matrix 143.451 143.356 143.310 143.202 143.079 143.294 143.146 142.963 143.039 143.032 143.039 142.957 142.904 142.956 142.920 142.837 142.756 142.928 143.130 143.069 ... 4. USDCAD: 100 Close prices were added to the matrix 1.32840 1.32877 1.32838 1.32660 1.32780 1.33068 1.33001 1.32798 1.32730 1.32782 1.32951 1.32868 1.32716 1.32663 1.32629 1.32614 1.32586 1.32578 1.32650 1.32789 ... 5. USDCHF: 100 Close prices were added to the matrix 0.96395 0.96440 0.96315 0.96161 0.96197 0.96337 0.96358 0.96228 0.96474 0.96529 0.96529 0.96502 0.96463 0.96429 0.96378 0.96377 0.96314 0.96428 0.96483 0.96509 ... */ //--- prepare a matrix of correlations between symbols matrix corr_from_vector=matrix::Zeros(size, size); Print("Compute pairwise correlation coefficients"); for(int i=0; i<size; i++) { for(int k=i; k<size; k++) { vector v1=rates.Col(i); vector v2=rates.Col(k); double coeff = v1.CorrCoef(v2); PrintFormat("corr(%s,%s) = %.3f", symbols[i], symbols[k], coeff); corr_from_vector[i][k]=coeff; } } Print("Correlation matrix on vectors: \n", corr_from_vector); /* Calculate pairwise correlation coefficients corr(EURUSD,EURUSD) = 1.000 corr(EURUSD,GBPUSD) = 0.974 corr(EURUSD,USDJPY) = -0.713 corr(EURUSD,USDCAD) = -0.950 corr(EURUSD,USDCHF) = -0.397 corr(GBPUSD,GBPUSD) = 1.000 corr(GBPUSD,USDJPY) = -0.744 corr(GBPUSD,USDCAD) = -0.953 corr(GBPUSD,USDCHF) = -0.362 corr(USDJPY,USDJPY) = 1.000 corr(USDJPY,USDCAD) = 0.736 corr(USDJPY,USDCHF) = 0.083 corr(USDCAD,USDCAD) = 1.000 corr(USDCAD,USDCHF) = 0.425 corr(USDCHF,USDCHF) = 1.000 Correlation matrix on vectors: [[1,0.9736363791537366,-0.7126365191640618,-0.9503129578410202,-0.3968181226230434] [0,1,-0.7440448047501974,-0.9525190338388175,-0.3617774666815978] [0,0,1,0.7360546499847362,0.08314381248168941] [0,0,0,0.9999999999999999,0.4247042496841555] [0,0,0,0,1]] */ //--- now let's see how a correlation matrix can be calculated in one line matrix corr_from_matrix=rates.CorrCoef(false); // false means that the vectors are in the matrix columns Print("Correlation matrix rates.CorrCoef(false): \n", corr_from_matrix.TriU()); //--- compare the resulting matrices to find discrepancies Print("How many discrepancy errors between result matrices?"); ulong errors=corr_from_vector.Compare(corr_from_matrix.TriU(), (float)1e-12); Print("corr_from_vector.Compare(corr_from_matrix,1e-12)=", errors); /* Correlation matrix rates.CorrCoef(false): [[1,0.9736363791537366,-0.7126365191640618,-0.9503129578410202,-0.3968181226230434] [0,1,-0.7440448047501974,-0.9525190338388175,-0.3617774666815978] [0,0,1,0.7360546499847362,0.08314381248168941] [0,0,0,1,0.4247042496841555] [0,0,0,0,1]] How many discrepancy errors between result matrices? corr_from_vector.Compare(corr_from_matrix,1e-12)=0 */ //--- create a nice output of the correlation matrix Print("Output the correlation matrix with headers"); string header=" "; // header for(int i=0; i<size; i++) header+=" "+symbols[i]; Print(header); //--- now rows for(int i=0; i<size; i++) { string line=symbols[i]+" "; line+=VectorToString(corr_from_vector.Row(i), size, 3, 8); Print(line); } /* Output the correlation matrix with headers EURUSD GBPUSD USDJPY USDCAD USDCHF EURUSD 1.0 0.974 -0.713 -0.950 -0.397 GBPUSD 0.0 1.0 -0.744 -0.953 -0.362 USDJPY 0.0 0.0 1.0 0.736 0.083 USDCAD 0.0 0.0 0.0 1.0 0.425 USDCHF 0.0 0.0 0.0 0.0 1.0 */ } //+------------------------------------------------------------------+ //| Returns a string with vector values | //+------------------------------------------------------------------+ string VectorToString(const vector &v, int length=20, int digits=5, int width=8) { ulong size=(ulong)MathMin(20, v.Size()); //--- compose a string string line=""; for(ulong i=0; i<size; i++) { string value=DoubleToString(v[i], digits); StringReplace(value, ".000", ".0"); line+=Indent(width-StringLen(value))+value; } //--- add a tail if the vector length exceeds the specified size if(v.Size()>size) line+=" ..."; //--- return(line); } //+------------------------------------------------------------------+ //| Returns a string with the specified number of spaces | //+------------------------------------------------------------------+ string Indent(int number) { string indent=""; for(int i=0; i<number; i++) indent+=" "; return(indent); }
O exemplo mostra como:
- Obter os preços de fechamento usando o CopyRates
- Inserir um vetor em uma matriz usando o método col
- Calcular o coeficiente de correlação entre os dois vetores usando CorrCoef
- Calcular a matriz de correlação sobre uma matriz com vetores de valor usando CorrCoef
- Retornar uma matriz triangular superior usando o método TriU
- Comparar duas matrizes e encontrar discrepâncias usando o método Compare
Operações matriciais e vetoriais
Operações matemáticas elementares de adição, subtração, multiplicação e divisão podem ser realizadas em matrizes e vetores. Ambos os objetos em tais operações devem ser do mesmo tipo e devem ter os mesmos tamanhos. Cada elemento da matriz ou vetor opera no elemento correspondente da segunda matriz ou vetor.
Você também pode usar um escalar do tipo apropriado (duplo, flutuante ou complexo) como segundo termo (multiplicador, subtraendo ou divisor). Nesse caso, cada membro da matriz ou vetor operará no escalar especificado.
matrix matrix_a={{0.1,0.2,0.3},{0.4,0.5,0.6}}; matrix matrix_b={{1,2,3},{4,5,6}}; matrix matrix_c1=matrix_a+matrix_b; matrix matrix_c2=matrix_b-matrix_a; matrix matrix_c3=matrix_a*matrix_b; // Hadamard product matrix matrix_c4=matrix_b/matrix_a; matrix_c1=matrix_a+1; matrix_c2=matrix_b-double_value; matrix_c3=matrix_a*M_PI; matrix_c4=matrix_b/0.1; //--- operations in place are possible matrix_a+=matrix_b; matrix_a/=2;
Além disso, matrizes e vetores podem ser passados como um segundo parâmetro para a maioria das funções matemáticas, incluindo MathAbs, MathArccos, MathArcsin, MathArctan, MathCeil, MathCos, MathExp, MathFloor, MathLog, MathLog10, MathMod, MathPow, MathRound, MathSin, MathSqrt, MathTan, MathExpm1, MathLog1p, MathArccosh, MathArcsinh, MathArctanh, MathCosh, MathSinh, MathTanh. Tais operações implicam na manipulação de elementos de matrizes ou vetores. Exemplo:
//--- matrix a= {{1, 4}, {9, 16}}; Print("matrix a=\n",a); a=MathSqrt(a); Print("MatrSqrt(a)=\n",a); /* matrix a= [[1,4] [9,16]] MatrSqrt(a)= [[1,2] [3,4]] */
Para o MathMod e MathPow, o segundo elemento pode ser um escalar ou uma matriz/vetor de tamanho apropriado.
matrix<T> mat1(128,128); matrix<T> mat3(mat1.Rows(),mat1.Cols()); ulong n,size=mat1.Rows()*mat1.Cols(); ... mat2=MathPow(mat1,(T)1.9); for(n=0; n<size; n++) { T res=MathPow(mat1.Flat(n),(T)1.9); if(res!=mat2.Flat(n)) errors++; } mat2=MathPow(mat1,mat3); for(n=0; n<size; n++) { T res=MathPow(mat1.Flat(n),mat3.Flat(n)); if(res!=mat2.Flat(n)) errors++; } ... vector<T> vec1(16384); vector<T> vec3(vec1.Size()); ulong n,size=vec1.Size(); ... vec2=MathPow(vec1,(T)1.9); for(n=0; n<size; n++) { T res=MathPow(vec1[n],(T)1.9); if(res!=vec2[n]) errors++; } vec2=MathPow(vec1,vec3); for(n=0; n<size; n++) { T res=MathPow(vec1[n],vec3[n]); if(res!=vec2[n]) errors++; }
Manipulações
A MQL5 suporta as seguintes manipulações básicas em matrizes e vetores, que não requerem nenhum cálculo:
- Transposição
- Extração de linhas, colunas e diagonais
- Redimensionamento e remodelação de matrizes
- Troca de linhas e colunas especificadas
- Cópia para um novo objeto
- Comparação de dois objetos
- Divisão de uma matriz em várias submatrizes
- Ordenação
matrix a= {{0, 1, 2}, {3, 4, 5}}; Print("matrix a \n", a); Print("a.Transpose() \n", a.Transpose()); /* matrix a [[0,1,2] [3,4,5]] a.Transpose() [[0,3] [1,4] [2,5]] */
Abaixo estão exemplos mostrando como definir e extrair uma diagonal usando o método diag:
vector v1={1,2,3}; matrix m1; m1.Diag(v1); Print("m1\n",m1); /* m1 [[1,0,0] [0,2,0] [0,0,3]] m2 */ matrix m2; m2.Diag(v1,-1); Print("m2\n",m2); /* m2 [[0,0,0] [1,0,0] [0,2,0] [0,0,3]] */ matrix m3; m3.Diag(v1,1); Print("m3\n",m3); /* m3 [[0,1,0,0] [0,0,2,0] [0,0,0,3]] */ matrix m4=matrix::Full(4,5,9); m4.Diag(v1,1); Print("m4\n",m4); Print("diag -1 - ",m4.Diag(-1)); Print("diag 0 - ",m4.Diag()); Print("diag 1 - ",m4.Diag(1)); /* m4 [[9,1,9,9,9] [9,9,2,9,9] [9,9,9,3,9] [9,9,9,9,9]] diag -1 - [9,9,9] diag 0 - [9,9,9,9] diag 1 - [1,2,3,9] */
Alterar o tamanho de uma matriz usando o método Reshape:
matrix matrix_a={{1,2,3},{4,5,6},{7,8,9},{10,11,12}}; Print("matrix_a\n",matrix_a); /* matrix_a [[1,2,3] [4,5,6] [7,8,9] [10,11,12]] */ matrix_a.Reshape(2,6); Print("Reshape(2,6)\n",matrix_a); /* Reshape(2,6) [[1,2,3,4,5,6] [7,8,9,10,11,12]] */ matrix_a.Reshape(3,5); Print("Reshape(3,5)\n",matrix_a); /* Reshape(3,5) [[1,2,3,4,5] [6,7,8,9,10] [11,12,0,3,0]] */ matrix_a.Reshape(2,4); Print("Reshape(2,4)\n",matrix_a); /* Reshape(2,4) [[1,2,3,4] [5,6,7,8]] */
Exemplos de uma divisão vertical de uma matriz usando o método Vsplit:
matrix matrix_a={{ 1, 2, 3, 4, 5, 6}, { 7, 8, 9,10,11,12}, {13,14,15,16,17,18}}; matrix splitted[]; ulong parts[]={2,3}; matrix_a.Vsplit(2,splitted); for(uint i=0; i<splitted.Size(); i++) Print("splitted ",i,"\n",splitted[i]); /* splitted 0 [[1,2,3] [7,8,9] [13,14,15]] splitted 1 [[4,5,6] [10,11,12] [16,17,18]] */ matrix_a.Vsplit(3,splitted); for(uint i=0; i<splitted.Size(); i++) Print("splitted ",i,"\n",splitted[i]); /* splitted 0 [[1,2] [7,8] [13,14]] splitted 1 [[3,4] [9,10] [15,16]] splitted 2 [[5,6] [11,12] [17,18]] */ matrix_a.Vsplit(parts,splitted); for(uint i=0; i<splitted.Size(); i++) Print("splitted ",i,"\n",splitted[i]); /* splitted 0 [[1,2] [7,8] [13,14]] splitted 1 [[3,4,5] [9,10,11] [15,16,17]] splitted 2 [[6] [12] [18]] */
O método Col e Row permitem obter os elementos relevantes da matriz, bem como inserir elementos em matrizes não alocadas, ou seja, matrizes sem o tamanho especificado. Aqui está um exemplo:
vector v1={1,2,3}; matrix m1; m1.Col(v1,1); Print("m1\n",m1); /* m1 [[0,1] [0,2] [0,3]] */ matrix m2=matrix::Full(4,5,8); m2.Col(v1,2); Print("m2\n",m2); /* m2 [[8,8,1,8,8] [8,8,2,8,8] [8,8,3,8,8] [8,8,8,8,8]] */ Print("col 1 - ",m2.Col(1)); /* col 1 - [8,8,8,8] */ Print("col 2 - ",m2.Col(2)); /* col 1 - [8,8,8,8] col 2 - [1,2,3,8] */
Produtos
A multiplicação de matrizes é um dos algoritmos básicos amplamente utilizados nos métodos numéricos. Muitas implementações de algoritmos de retropropagação e propagação direta em rede neural as camadas convolucionais são baseadas nesta operação. Muitas vezes, 90-95% de todo o tempo gasto em aprendizado de máquina é tomado por esta operação. Todos os métodos de produtos são fornecidos sob a seção de ajuda de Produtos de matrizes e vetores.
O exemplo a seguir mostra a multiplicação de duas matrizes usando o método MatMul:
matrix a={{1, 0, 0}, {0, 1, 0}}; matrix b={{4, 1}, {2, 2}, {1, 3}}; matrix c1=a.MatMul(b); matrix c2=b.MatMul(a); Print("c1 = \n", c1); Print("c2 = \n", c2); /* c1 = [[4,1] [2,2]] c2 = [[4,1,0] [2,2,0] [1,3,0]] */
Um exemplo do produto Kronecker de duas matrizes ou uma matriz e um vetor, usando o método Kron.
matrix a={{1,2,3},{4,5,6}}; matrix b=matrix::Identity(2,2); vector v={1,2}; Print(a.Kron(b)); Print(a.Kron(v)); /* [[1,0,2,0,3,0] [0,1,0,2,0,3] [4,0,5,0,6,0] [0,4,0,5,0,6]] [[1,2,2,4,3,6] [4,8,5,10,6,12]] */
Mais exemplos do artigo Matrizes e Vetores em MQL5:
//--- initialize matrices matrix m35, m52; m35.Init(3,5,Arange); m52.Init(5,2,Arange); //--- Print("1. Product of horizontal vector v[3] and matrix m[3,5]"); vector v3 = {1,2,3}; Print("On the left v3 = ",v3); Print("On the right m35 = \n",m35); Print("v3.MatMul(m35) = horizontal vector v[5] \n",v3.MatMul(m35)); /* 1. Product of horizontal vector v[3] and matrix m[3,5] On the left v3 = [1,2,3] On the right m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] v3.MatMul(m35) = horizontal vector v[5] [40,46,52,58,64] */ //--- show that this is really a horizontal vector Print("\n2. Product of matrix m[1,3] and matrix m[3,5]"); matrix m13; m13.Init(1,3,Arange,1); Print("On the left m13 = \n",m13); Print("On the right m35 = \n",m35); Print("m13.MatMul(m35) = matrix m[1,5] \n",m13.MatMul(m35)); /* 2. Product of matrix m[1,3] and matrix m[3,5] On the left m13 = [[1,2,3]] On the right m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] m13.MatMul(m35) = matrix m[1,5] [[40,46,52,58,64]] */ Print("\n3. Product of matrix m[3,5] and vertical vector v[5]"); vector v5 = {1,2,3,4,5}; Print("On the left m35 = \n",m35); Print("On the right v5 = ",v5); Print("m35.MatMul(v5) = vertical vector v[3] \n",m35.MatMul(v5)); /* 3. Product of matrix m[3,5] and vertical vector v[5] On the left m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] On the right v5 = [1,2,3,4,5] m35.MatMul(v5) = vertical vector v[3] [40,115,190] */ //--- show that this is really a vertical vector Print("\n4. Product of matrix m[3,5] and matrix m[5,1]"); matrix m51; m51.Init(5,1,Arange,1); Print("On the left m35 = \n",m35); Print("On the right m51 = \n",m51); Print("m35.MatMul(m51) = matrix v[3] \n",m35.MatMul(m51)); /* 4. Product of matrix m[3,5] and matrix m[5,1] On the left m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] On the right m51 = [[1] [2] [3] [4] [5]] m35.MatMul(m51) = matrix v[3] [[40] [115] [190]] */ Print("\n5. Product of matrix m[3,5] and matrix m[5,2]"); Print("On the left m35 = \n",m35); Print("On the right m52 = \n",m52); Print("m35.MatMul(m52) = matrix m[3,2] \n",m35.MatMul(m52)); /* 5. Product of matrix m[3,5] and matrix m[5,2] On the left m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] On the right m52 = [[0,1] [2,3] [4,5] [6,7] [8,9]] m35.MatMul(m52) = matrix m[3,2] [[60,70] [160,195] [260,320]] */ Print("\n6. Product of horizontal vector v[5] and matrix m[5,2]"); Print("On the left v5 = \n",v5); Print("On the right m52 = \n",m52); Print("v5.MatMul(m52) = horizontal vector v[2] \n",v5.MatMul(m52)); /* 6. The product of horizontal vector v[5] and matrix m[5,2] On the left v5 = [1,2,3,4,5] On the right m52 = [[0,1] [2,3] [4,5] [6,7] [8,9]] v5.MatMul(m52) = horizontal vector v[2] [80,95] */ Print("\n7. Outer() product of horizontal vector v[5] and vertical vector v[3]"); Print("On the left v5 = \n",v5); Print("On the right v3 = \n",v3); Print("v5.Outer(v3) = matrix m[5,3] \n",v5.Outer(v3)); /* 7. Outer() product of horizontal vector v[5] and vertical vector v[3] On the left v5 = [1,2,3,4,5] On the right v3 = [1,2,3] v5.Outer(v3) = matrix m[5,3] [[1,2,3] [2,4,6] [3,6,9] [4,8,12] [5,10,15]] */
Transformações
Transformações matriciais são frequentemente usadas em operações de dados. No entanto, muitas operações matriciais complexas não podem ser resolvidas de forma eficiente ou estável devido à precisão limitada dos computadores.
Transformações de matrizes (ou decomposições) são métodos que reduzem uma matriz em suas partes componentes, o que facilita o cálculo de operações de matrizes mais complexas. Métodos de decomposição de matrizes, também conhecidos como métodos de fatoração de matrizes, são a espinha dorsal da álgebra linear em computadores, mesmo para operações básicas como sistemas de resolução de equações lineares, cálculo da inversa e cálculo do determinante de uma matriz.
O aprendizado de máquina usa amplamente a Decomposição em Valores Singulares (SVD), que permite a representação da matriz original como o produto de três outras matrizes. A SVD é usada para resolver uma variedade de problemas, desde aproximação dos mínimos quadrados até a compressão e reconhecimento de imagem.
Um exemplo da Decomposição em Valores Singulares pelo método SVD:
matrix a= {{0, 1, 2, 3, 4, 5, 6, 7, 8}}; a=a-4; Print("matrix a \n", a); a.Reshape(3, 3); matrix b=a; Print("matrix b \n", b); //--- execute SVD decomposition matrix U, V; vector singular_values; b.SVD(U, V, singular_values); Print("U \n", U); Print("V \n", V); Print("singular_values = ", singular_values); // check block //--- U * singular diagonal * V = A matrix matrix_s; matrix_s.Diag(singular_values); Print("matrix_s \n", matrix_s); matrix matrix_vt=V.Transpose(); Print("matrix_vt \n", matrix_vt); matrix matrix_usvt=(U.MatMul(matrix_s)).MatMul(matrix_vt); Print("matrix_usvt \n", matrix_usvt); ulong errors=(int)b.Compare(matrix_usvt, 1e-9); double res=(errors==0); Print("errors=", errors); //---- another check matrix U_Ut=U.MatMul(U.Transpose()); Print("U_Ut \n", U_Ut); Print("Ut_U \n", (U.Transpose()).MatMul(U)); matrix vt_V=matrix_vt.MatMul(V); Print("vt_V \n", vt_V); Print("V_vt \n", V.MatMul(matrix_vt)); /* matrix a [[-4,-3,-2,-1,0,1,2,3,4]] matrix b [[-4,-3,-2] [-1,0,1] [2,3,4]] U [[-0.7071067811865474,0.5773502691896254,0.408248290463863] [-6.827109697437648e-17,0.5773502691896253,-0.8164965809277256] [0.7071067811865472,0.5773502691896255,0.4082482904638627]] V [[0.5773502691896258,-0.7071067811865474,-0.408248290463863] [0.5773502691896258,1.779939029415334e-16,0.8164965809277258] [0.5773502691896256,0.7071067811865474,-0.408248290463863]] singular_values = [7.348469228349533,2.449489742783175,3.277709923350408e-17] matrix_s [[7.348469228349533,0,0] [0,2.449489742783175,0] [0,0,3.277709923350408e-17]] matrix_vt [[0.5773502691896258,0.5773502691896258,0.5773502691896256] [-0.7071067811865474,1.779939029415334e-16,0.7071067811865474] [-0.408248290463863,0.8164965809277258,-0.408248290463863]] matrix_usvt [[-3.999999999999997,-2.999999999999999,-2] [-0.9999999999999981,-5.977974170712231e-17,0.9999999999999974] [2,2.999999999999999,3.999999999999996]] errors=0 U_Ut [[0.9999999999999993,-1.665334536937735e-16,-1.665334536937735e-16] [-1.665334536937735e-16,0.9999999999999987,-5.551115123125783e-17] [-1.665334536937735e-16,-5.551115123125783e-17,0.999999999999999]] Ut_U [[0.9999999999999993,-5.551115123125783e-17,-1.110223024625157e-16] [-5.551115123125783e-17,0.9999999999999987,2.498001805406602e-16] [-1.110223024625157e-16,2.498001805406602e-16,0.999999999999999]] vt_V [[1,-5.551115123125783e-17,0] [-5.551115123125783e-17,0.9999999999999996,1.110223024625157e-16] [0,1.110223024625157e-16,0.9999999999999996]] V_vt [[0.9999999999999999,1.110223024625157e-16,1.942890293094024e-16] [1.110223024625157e-16,0.9999999999999998,1.665334536937735e-16] [1.942890293094024e-16,1.665334536937735e-16,0.9999999999999996] */ }
Outra transformação comumente usada é a decomposição de Cholesky, que pode ser usada para resolver um sistema de equações lineares Ax=b se a matriz A for simétrica e positiva definida.
Em MQL5, a decomposição de Cholesky é executada pelo método Cholesky:
matrix matrix_a= {{5.7998084, -2.1825367}, {-2.1825367, 9.85910595}}; matrix matrix_l; Print("matrix_a\n", matrix_a); matrix_a.Cholesky(matrix_l); Print("matrix_l\n", matrix_l); Print("check\n", matrix_l.MatMul(matrix_l.Transpose())); /* matrix_a [[5.7998084,-2.1825367] [-2.1825367,9.85910595]] matrix_l [[2.408279136645086,0] [-0.9062640068544704,3.006291985133859]] check [[5.7998084,-2.1825367] [-2.1825367,9.85910595]] */
A tabela abaixo mostra a lista de métodos disponíveis:
| Função | Ação |
|---|---|
| Calcula a decomposição de Cholesky | |
| Calcula os autovalores e autovetores à direita de uma matriz quadrada | |
| Calcula os autovalores de uma matriz geral | |
| Decomposição LU de uma matriz como o produto de uma matriz triangular inferior e uma matriz triangular superior | |
| Decomposição LUP com pivotamento parcial, que se refere à decomposição LU apenas com permutações de linha: PA=LU | |
| Calcula a Decomposição QR de uma matriz | |
| Decomposição em Valores Singulares |
Obtenção de estatísticas
- Valores máximos e mínimos, juntamente com os seus índices em uma matriz/vetor
- A soma e o produto dos elementos, bem como a soma e o produto cumulativo
- Mediana, média, média aritmética e média ponderada dos valores da matriz/vetor
- Desvio padrão e variância do elemento
- Percentis e quantis
- Métrica de regressão como o erro do desvio da linha de regressão construída na matriz de dados especificada
Um exemplo de cálculo do desvio padrão pelo método Std:
matrixf matrix_a={{10,3,2},{1,8,12},{6,5,4},{7,11,9}};
Print("matrix_a\n",matrix_a);
vectorf cols_std=matrix_a.Std(0);
vectorf rows_std=matrix_a.Std(1);
float matrix_std=matrix_a.Std();
Print("cols_std ",cols_std);
Print("rows_std ",rows_std);
Print("std value ",matrix_std);
/*
matrix_a
[[10,3,2]
[1,8,12]
[6,5,4]
[7,11,9]]
cols_std [3.2403703,3.0310888,3.9607449]
rows_std [3.5590262,4.5460606,0.81649661,1.6329932]
std value 3.452052593231201
*/
Cálculo do quantis pelo método Quantile:
matrixf matrix_a={{1,2,3},{4,5,6},{7,8,9},{10,11,12}};
Print("matrix_a\n",matrix_a);
vectorf cols_percentile=matrix_a.Percentile(50,0);
vectorf rows_percentile=matrix_a.Percentile(50,1);
float matrix_percentile=matrix_a.Percentile(50);
Print("cols_percentile ",cols_percentile);
Print("rows_percentile ",rows_percentile);
Print("percentile value ",matrix_percentile);
/*
matrix_a
[[1,2,3]
[4,5,6]
[7,8,9]
[10,11,12]]
cols_percentile [5.5,6.5,7.5]
rows_percentile [2,5,8,11]
percentile value 6.5
*/
Características da matriz
Uso dos métodos da seção Características para obter os seguintes valores:
- O número de linhas e colunas em uma matriz
- A norma e o número de condicionalidade
- Determinante, posto, traço e espectro de uma matriz
Cálculo do posto de uma matriz usando o método Rank:
matrix a=matrix::Eye(4, 4);; Print("matrix a \n", a); Print("a.Rank()=", a.Rank()); matrix I=matrix::Eye(4, 4); I[3, 3] = 0.; // matrix deficit Print("I \n", I); Print("I.Rank()=", I.Rank()); matrix b=matrix::Ones(1, 4); Print("b \n", b); Print("b.Rank()=", b.Rank());;// 1 size - rank 1, unless all 0 matrix zeros=matrix::Zeros(4, 1); Print("zeros \n", zeros); Print("zeros.Rank()=", zeros.Rank()); /* matrix a [[1,0,0,0] [0,1,0,0] [0,0,1,0] [0,0,0,1]] a.Rank()=4 I [[1,0,0,0] [0,1,0,0] [0,0,1,0] [0,0,0,0]] I.Rank()=3 b [[1,1,1,1]] b.Rank()=1 zeros [[0] [0] [0] [0]] zeros.Rank()=0 */
Cálculo da norma usando o método Norm:
matrix a= {{0, 1, 2, 3, 4, 5, 6, 7, 8}}; a=a-4; Print("matrix a \n", a); a.Reshape(3, 3); matrix b=a; Print("matrix b \n", b); Print("b.Norm(MATRIX_NORM_P2)=", b.Norm(MATRIX_NORM_FROBENIUS)); Print("b.Norm(MATRIX_NORM_FROBENIUS)=", b.Norm(MATRIX_NORM_FROBENIUS)); Print("b.Norm(MATRIX_NORM_INF)", b.Norm(MATRIX_NORM_INF)); Print("b.Norm(MATRIX_NORM_MINUS_INF)", b.Norm(MATRIX_NORM_MINUS_INF)); Print("b.Norm(MATRIX_NORM_P1)=)", b.Norm(MATRIX_NORM_P1)); Print("b.Norm(MATRIX_NORM_MINUS_P1)=", b.Norm(MATRIX_NORM_MINUS_P1)); Print("b.Norm(MATRIX_NORM_P2)=", b.Norm(MATRIX_NORM_P2)); Print("b.Norm(MATRIX_NORM_MINUS_P2)=", b.Norm(MATRIX_NORM_MINUS_P2)); /* matrix a [[-4,-3,-2,-1,0,1,2,3,4]] matrix b [[-4,-3,-2] [-1,0,1] [2,3,4]] b.Norm(MATRIX_NORM_P2)=7.745966692414834 b.Norm(MATRIX_NORM_FROBENIUS)=7.745966692414834 b.Norm(MATRIX_NORM_INF)9.0 b.Norm(MATRIX_NORM_MINUS_INF)2.0 b.Norm(MATRIX_NORM_P1)=)7.0 b.Norm(MATRIX_NORM_MINUS_P1)=6.0 b.Norm(MATRIX_NORM_P2)=7.348469228349533 b.Norm(MATRIX_NORM_MINUS_P2)=1.857033188519056e-16 */
Resolução de equações
Métodos de aprendizado de máquina e problemas de otimização geralmente exigem encontrar as soluções para um sistema de equações lineares. A seção Soluções contém quatro métodos que permitem a solução de tais equações dependendo do tipo de matriz.
| Função | Ação |
|---|---|
| Resolver uma equação de matriz linear ou um sistema de equações algébricas lineares | |
| Retorna a solução dos mínimos quadrados de equações algébricas lineares (para matrizes não quadradas ou degeneradas) | |
| Cálculo do inverso multiplicativo de uma matriz quadrada invertível pelo método de Jordan-Gauss | |
| Calcula a pseudo-inversa de uma matriz pelo método de Moore-Penrose |

Precisamos encontrar o vetor solução x. A matriz A não é quadrada e, portanto, o método Solve não pode ser usado aqui.
Nós usaremos o método LstSq que permite a resolução aproximada de matrizes não quadradas ou degeneradas.matrix a={{3, 2}, {4,-5}, {3, 3}}; vector b={7,40,3}; //--- solve the system A*x = b vector x=a.LstSq(b); //--- check the solution, x must be equal to [5, -4] Print("x=", x); /* x=[5.00000000,-4] */ //--- check A*x = b1, the resulting vector must be [7, 40, 3] vector b1=a.MatMul(x); Print("b11=",b1); /* b1=[7.0000000,40.0000000,3.00000000] */
A verificação mostrou que o vetor encontrado x é a solução desse sistema de equações.
Métodos de Aprendizado de Máquina
Existem três métodos de matriz e vetor que podem ser usados no aprendizado de máquina.
| Função | Ação |
|---|---|
| Calcula os valores da função de ativação e grava-os no vetor/matriz passado | |
| Calcula os valores derivados da função de ativação e escreve-os no vetor/matriz passado | |
| Calcula os valores da função de perda e grava-os no vetor/matriz passado |
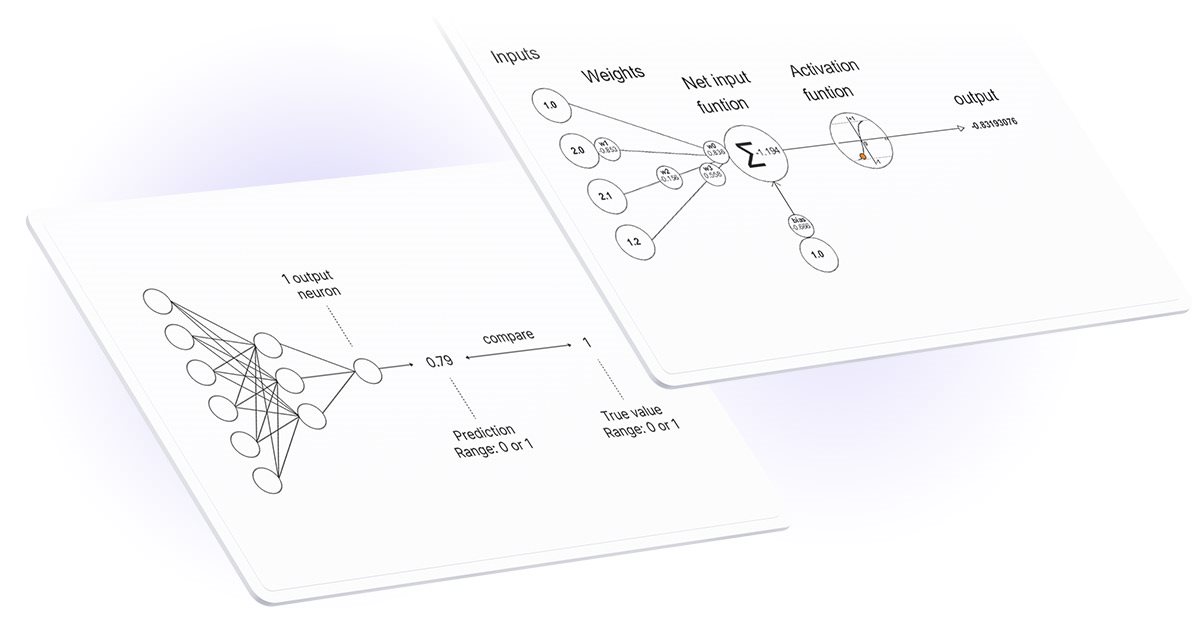
As funções de ativação são usadas em redes neurais para encontrar uma saída dependendo da soma ponderada das entradas. A seleção da função de ativação tem um grande impacto no desempenho da rede neural.
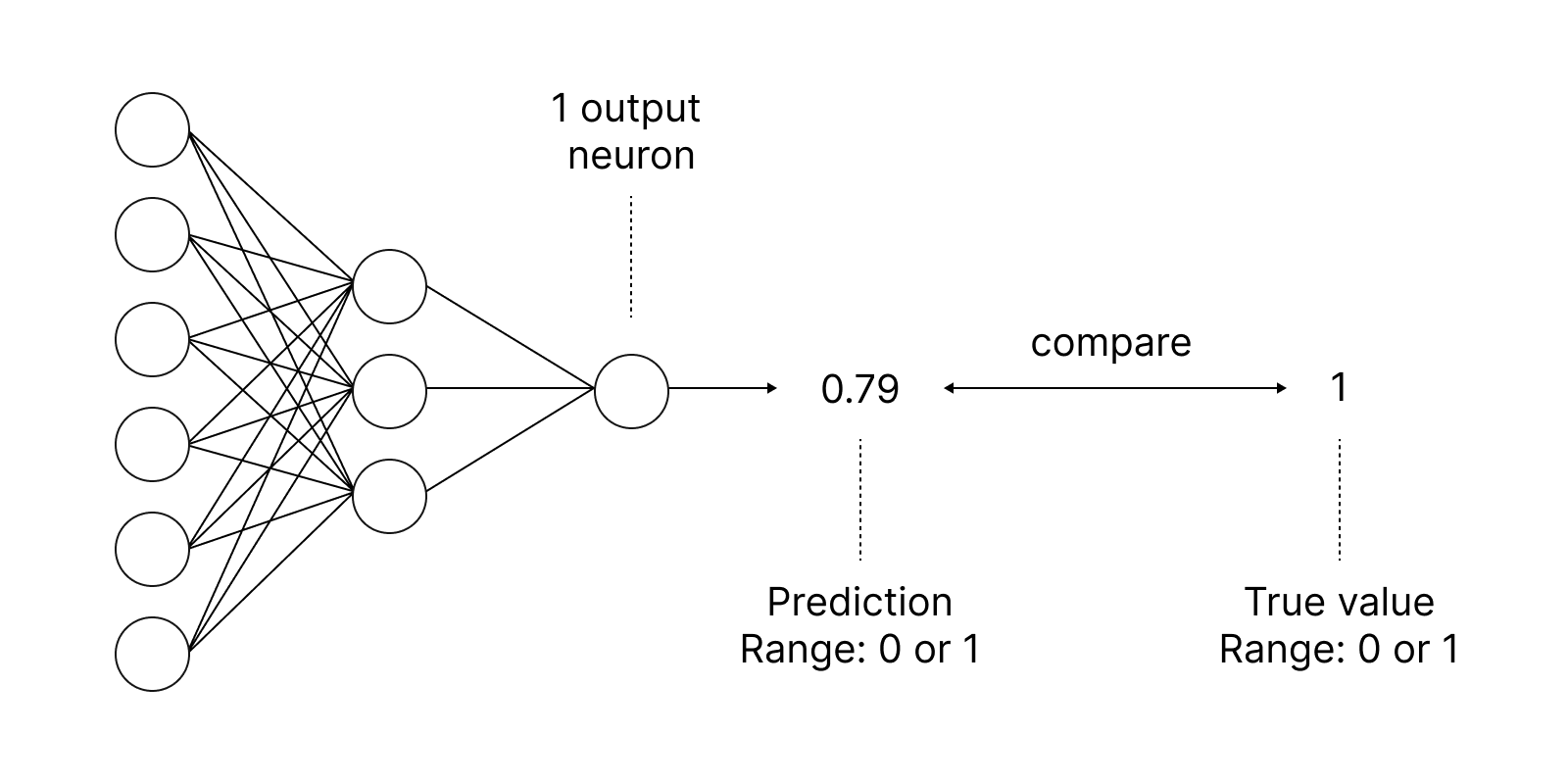
Uma das funções de ativação mais populares é o sigmóide.
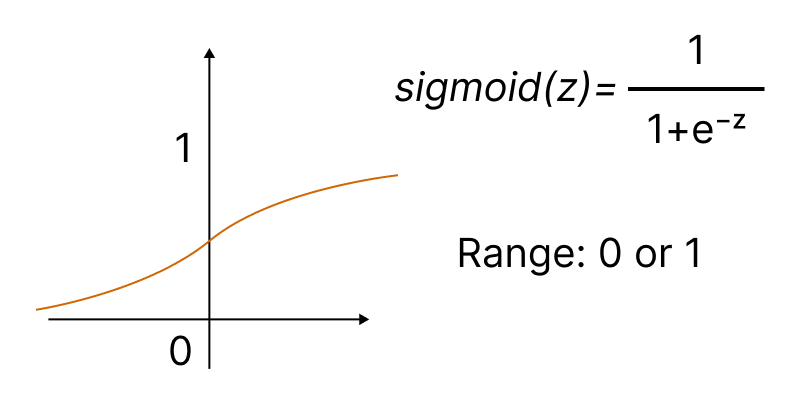
O método Activation integrado permite definir um dos quinze tipos de função de ativação. Todos eles estão disponíveis na enumeração ENUM_ACTIVATION_FUNCTION.
| ID | Descrição |
|---|---|
| AF_ELU | Unidade Linear Exponencial |
| AF_EXP | Exponencial |
| AF_GELU | Unidade Linear de Erro Gaussiano |
| AF_HARD_SIGMOID | Sigmóide rígido |
| AF_LINEAR | Linear |
| AF_LRELU | Unidade Linear Retificada com Vazamento (Leaky ReLU) |
| AF_RELU | Unidade Linear Retificada (ReLU) |
| AF_SELU | Unidade Linear Exponencial Escalada |
| AF_SIGMOID | Sigmoide |
| AF_SOFTMAX | Softmax |
| AF_SOFTPLUS | Softplus |
| AF_SOFTSIGN | Softsign |
| AF_SWISH | Swish |
| AF_TANH | A função tangente hiperbólica |
| AF_TRELU | Unidade Linear Retificada Limiar |
Uma rede neural visa encontrar um algoritmo que minimize o erro de aprendizado, para o qual é utilizada a função de perda. O desvio é calculado usando o método Loss para o qual você pode especificar um dos 14 tipos da enumeração ENUM_LOSS_FUNCTION.
Os valores de desvio resultantes são então usados para refinar os parâmetros da rede neural. Isso é feito usando o método Derivative, que calcula os valores da derivada da função de ativação e escreve o resultado no vetor/matriz passado. O processo de treinamento da rede neural pode ser representado visualmente usando a animação do artigo "Construindo uma rede neural profunda do zero em linguagem MQL".
Melhorias no OpenCL
Nós também implementamos o suporte matricial e vetorial nas funções CLBufferWrite e CLBufferRead. Sobrecargas correspondentes estão disponíveis para essas funções. Abaixo encontramos um exemplo para uma matriz.
Grava os valores da matriz no buffer e retorna true em caso de sucesso.
uint CLBufferWrite( int buffer, // OpenCL buffer handle uint buffer_offset, // offset in the OpenCL buffer in bytes matrix<T> &mat // matrix of values to write to buffer );
Lê um buffer OpenCL para uma matriz e retorna true em caso de sucesso.
uint CLBufferRead( int buffer, // OpenCL buffer handle uint buffer_offset, // offset in the OpenCL buffer in bytes const matrix& mat, // matrix to get values from the buffer ulong rows=-1, // number of rows in the matrix ulong cols=-1 // number of columns in the matrix );
Vamos considerar o uso de novas sobrecargas usando um exemplo do produto matricial de duas matrizes. Vamos fazer os cálculos usando três métodos:
- Uma maneira ingênua de ilustrar o algoritmo de multiplicação de matrizes
- O método MatMul integrado
- Cálculo paralelo em OpenCL
As matrizes obtidas serão verificadas usando o método Compare que compara os elementos de duas matrizes com a precisão dada.
#define M 3000 // number of rows in the first matrix #define K 2000 // number of columns in the first matrix equal to the number of rows in the second one #define N 3000 // number of columns in the second matrix //+------------------------------------------------------------------+ const string clSrc= "#define N "+IntegerToString(N)+" \r\n" "#define K "+IntegerToString(K)+" \r\n" " \r\n" "__kernel void matricesMul( __global float *in1, \r\n" " __global float *in2, \r\n" " __global float *out ) \r\n" "{ \r\n" " int m = get_global_id( 0 ); \r\n" " int n = get_global_id( 1 ); \r\n" " float sum = 0.0; \r\n" " for( int k = 0; k < K; k ++ ) \r\n" " sum += in1[ m * K + k ] * in2[ k * N + n ]; \r\n" " out[ m * N + n ] = sum; \r\n" "} \r\n"; //+------------------------------------------------------------------+ //| Script program start function | //+------------------------------------------------------------------+ void OnStart() { //--- initialize the random number generator MathSrand((int)TimeCurrent()); //--- fill matrices of the given size with random values matrixf mat1(M, K, MatrixRandom) ; // first matrix matrixf mat2(K, N, MatrixRandom); // second matrix //--- calculate the product of matrices using the naive way uint start=GetTickCount(); matrixf matrix_naive=matrixf::Zeros(M, N);// here we rite the result of multiplying two matrices for(int m=0; m<M; m++) for(int k=0; k<K; k++) for(int n=0; n<N; n++) matrix_naive[m][n]+=mat1[m][k]*mat2[k][n]; uint time_naive=GetTickCount()-start; //--- calculate the product of matrices using MatMull start=GetTickCount(); matrixf matrix_matmul=mat1.MatMul(mat2); uint time_matmul=GetTickCount()-start; //--- calculate the product of matrices in OpenCL matrixf matrix_opencl=matrixf::Zeros(M, N); int cl_ctx; // context handle if((cl_ctx=CLContextCreate(CL_USE_GPU_ONLY))==INVALID_HANDLE) { Print("OpenCL not found, exit"); return; } int cl_prg; // program handle int cl_krn; // kernel handle int cl_mem_in1; // handle of the first buffer (input) int cl_mem_in2; // handle of the second buffer (input) int cl_mem_out; // handle of the third buffer (output) //--- create the program and the kernel cl_prg = CLProgramCreate(cl_ctx, clSrc); cl_krn = CLKernelCreate(cl_prg, "matricesMul"); //--- create all three buffers for the three matrices cl_mem_in1=CLBufferCreate(cl_ctx, M*K*sizeof(float), CL_MEM_READ_WRITE); cl_mem_in2=CLBufferCreate(cl_ctx, K*N*sizeof(float), CL_MEM_READ_WRITE); //--- third matrix - output cl_mem_out=CLBufferCreate(cl_ctx, M*N*sizeof(float), CL_MEM_READ_WRITE); //--- set kernel arguments CLSetKernelArgMem(cl_krn, 0, cl_mem_in1); CLSetKernelArgMem(cl_krn, 1, cl_mem_in2); CLSetKernelArgMem(cl_krn, 2, cl_mem_out); //--- write matrices to device buffers CLBufferWrite(cl_mem_in1, 0, mat1); CLBufferWrite(cl_mem_in2, 0, mat2); CLBufferWrite(cl_mem_out, 0, matrix_opencl); //--- start the OpenCL code execution time start=GetTickCount(); //--- set the task workspace parameters and execute the OpenCL program uint offs[2] = {0, 0}; uint works[2] = {M, N}; start=GetTickCount(); bool ex=CLExecute(cl_krn, 2, offs, works); //--- read the result into the matrix if(CLBufferRead(cl_mem_out, 0, matrix_opencl)) PrintFormat("Matrix [%d x %d] read ", matrix_opencl.Rows(), matrix_opencl.Cols()); else Print("CLBufferRead(cl_mem_out, 0, matrix_opencl failed. Error ",GetLastError()); uint time_opencl=GetTickCount()-start; Print("Compare computation times of the methods"); PrintFormat("Naive product time = %d ms",time_naive); PrintFormat("MatMul product time = %d ms",time_matmul); PrintFormat("OpenCl product time = %d ms",time_opencl); //--- release all OpenCL contexts CLFreeAll(cl_ctx, cl_prg, cl_krn, cl_mem_in1, cl_mem_in2, cl_mem_out); //--- compare all obtained result matrices with each other Print("How many discrepancy errors between result matrices?"); ulong errors=matrix_naive.Compare(matrix_matmul,(float)1e-12); Print("matrix_direct.Compare(matrix_matmul,1e-12)=",errors); errors=matrix_matmul.Compare(matrix_opencl,float(1e-12)); Print("matrix_matmul.Compare(matrix_opencl,1e-12)=",errors); /* Result: Matrix [3000 x 3000] read Compare computation times of the methods Naive product time = 54750 ms MatMul product time = 4578 ms OpenCl product time = 922 ms How many discrepancy errors between result matrices? matrix_direct.Compare(matrix_matmul,1e-12)=0 matrix_matmul.Compare(matrix_opencl,1e-12)=0 */ } //+------------------------------------------------------------------+ //| Fills the matrix with random values | //+------------------------------------------------------------------+ void MatrixRandom(matrixf& m) { for(ulong r=0; r<m.Rows(); r++) { for(ulong c=0; c<m.Cols(); c++) { m[r][c]=(float)((MathRand()-16383.5)/32767.); } } } //+------------------------------------------------------------------+ //| Release all OpenCL contexts | //+------------------------------------------------------------------+ void CLFreeAll(int cl_ctx, int cl_prg, int cl_krn, int cl_mem_in1, int cl_mem_in2, int cl_mem_out) { //--- release all created OpenCL contexts in reverse order CLBufferFree(cl_mem_in1); CLBufferFree(cl_mem_in2); CLBufferFree(cl_mem_out); CLKernelFree(cl_krn); CLProgramFree(cl_prg); CLContextFree(cl_ctx); }
Uma explicação detalhada do código OpenCL deste exemplo é fornecida no artigo "OpenCL: Da programação ingênua até a mais perceptível".
Mais melhorias
A Build 3390 levantou duas restrições na operação OpenCL que afetavam o uso da GPU.
Para definir o uso obrigatório de GPUs com suporte ao tipo double para tarefas específicas, use o CL_USE_GPU_DOUBLE_ONLY na chamada da CLContextCreate.
int cl_ctx; //--- initialization of OpenCL context if((cl_ctx=CLContextCreate(CL_USE_GPU_DOUBLE_ONLY))==INVALID_HANDLE) { Print("OpenCL not found"); return; }
Embora as mudanças nas operações OpenCL não estejam diretamente relacionadas a matrizes e vetores, elas estão alinhadas com os nossos esforços no desenvolvimento dos recursos de aprendizado de máquina da linguagem MQL5.
O futuro da MQL5 no Aprendizado de Máquina
Nos últimos anos, nós fizemos muito para introduzir tecnologias avançadas na linguagem MQL5:
- Implementação da migração da biblioteca ALGLIB de métodos numéricos para a MQL5
- Implementação de uma biblioteca matemática com lógica difusa e métodos estatísticos
- Introdução da biblioteca de gráficos, análogo a função plot
- Integração com Python para executar scripts Python diretamente do terminal
- Adição das funções DirectX a criação de gráficos 3D
- Implementação nativa do Suporte a SQLite para operações com bases de dados
- Adição de novos tipos de dados:matrizes e vetores, juntamente com todos os métodos necessários
A linguagem MQL5 continuará a se desenvolver, enquanto uma das direções prioritárias é o aprendizado de máquina. Temos grandes planos para um maior desenvolvimento. Portanto, fique conosco, apoie-nos e continue aprendendo conosco.
Traduzido do russo pela MetaQuotes Ltd.
Artigo original: https://www.mql5.com/ru/articles/10922
 Redes neurais de maneira fácil (Parte 25): Exercícios práticos de transferência de aprendizado
Redes neurais de maneira fácil (Parte 25): Exercícios práticos de transferência de aprendizado
 Redes neurais de maneira fácil (Parte 26): aprendizado por reforço
Redes neurais de maneira fácil (Parte 26): aprendizado por reforço
 Redes neurais de maneira fácil (Parte 24): Melhorando a ferramenta para transferência de aprendizado
Redes neurais de maneira fácil (Parte 24): Melhorando a ferramenta para transferência de aprendizado
- Aplicativos de negociação gratuitos
- 8 000+ sinais para cópia
- Notícias econômicas para análise dos mercados financeiros
Você concorda com a política do site e com os termos de uso